 Город:
Город:
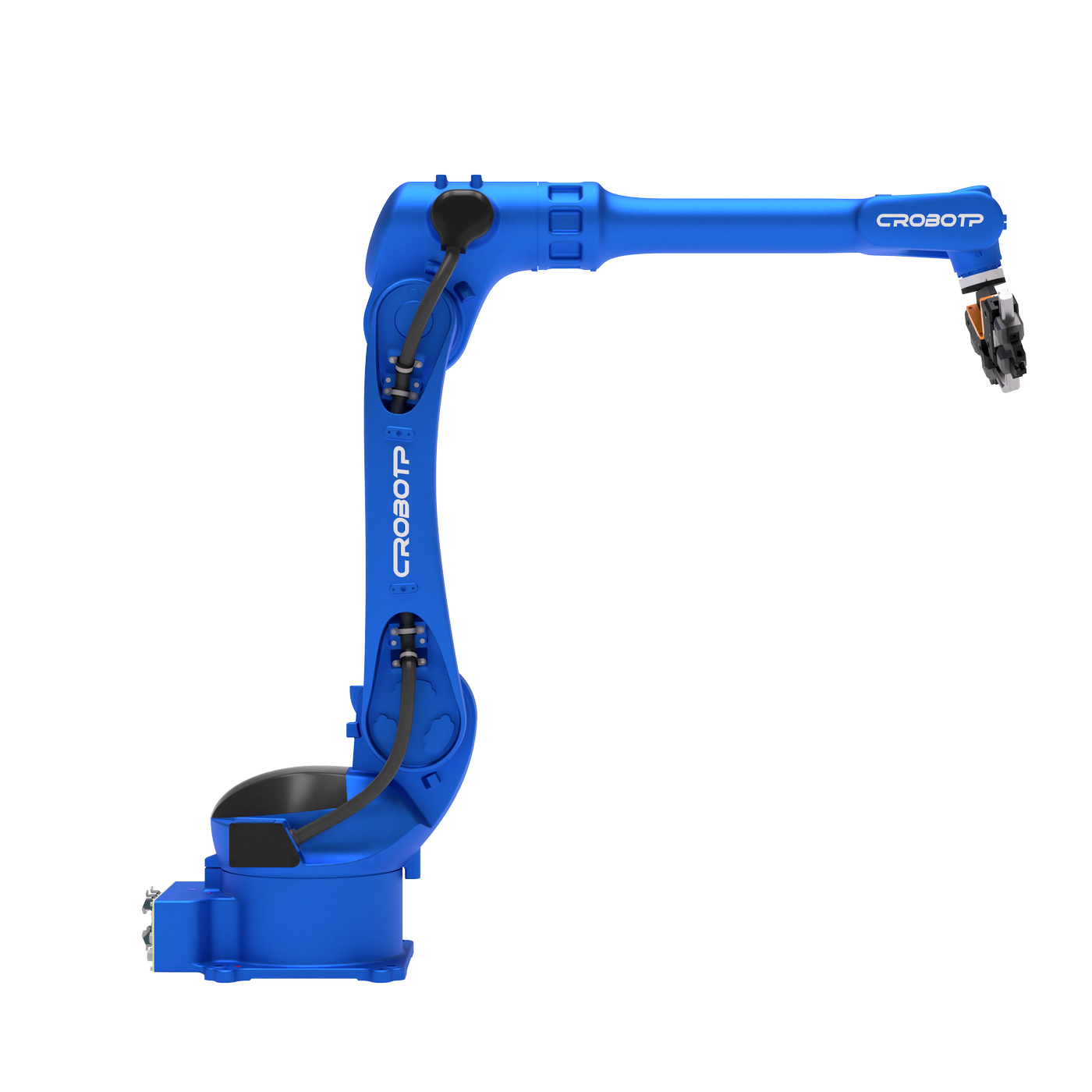
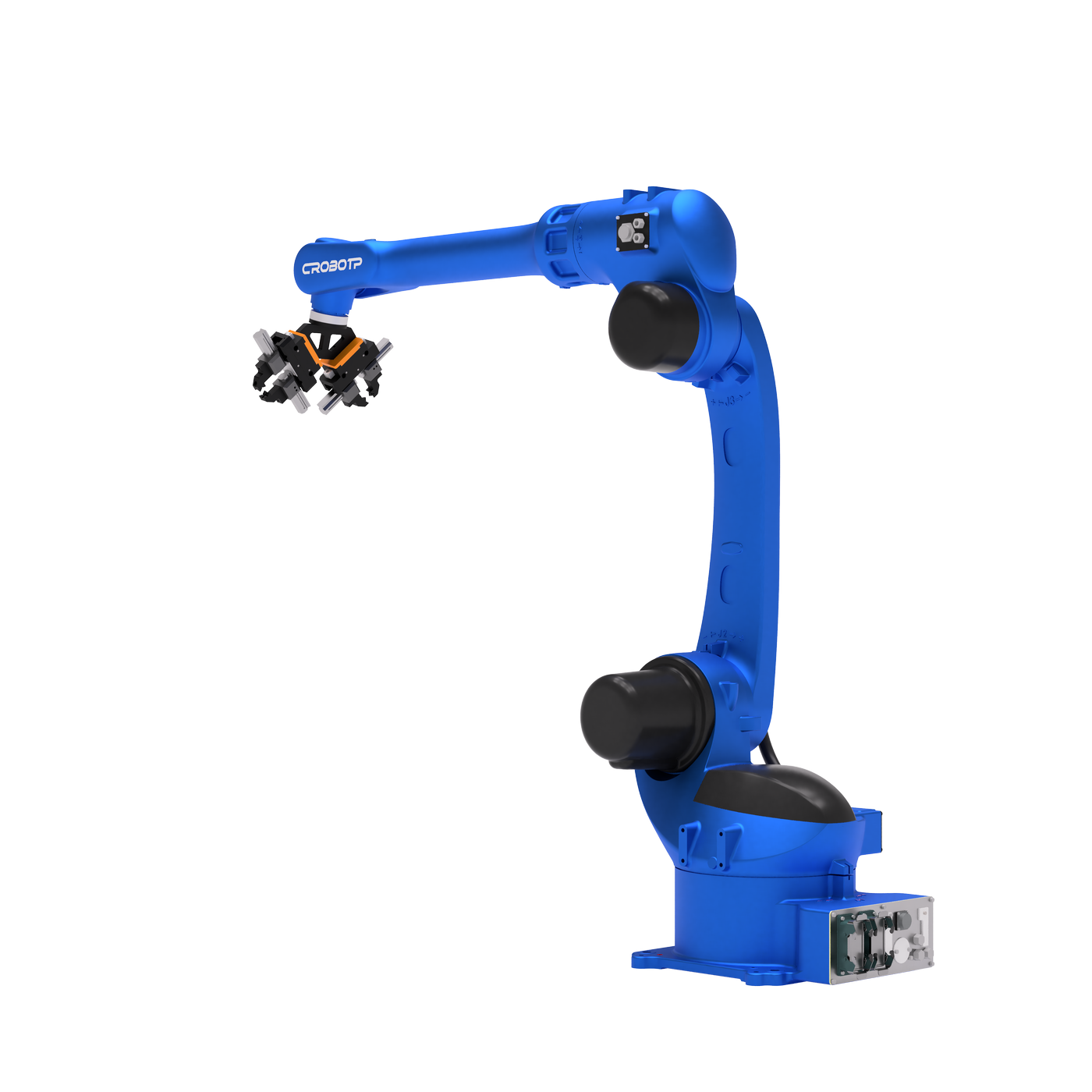
Робот для обслуживания станков CRP RA21-10-SR


Модификатор цены:
Цена:
Скидка:
Сумма налога:
Описание
| Форма руки | Вертикальный узловой шарнир |
| Степень подвижности | 6 осей |
| Максимальная нагрузка | 10 кг |
| Диапазон движения по Осям: | |
| Ось 1 | К полу/потолку -165°~165°, под углом -30°~30° |
| Ось 2 | -45°~175° |
| Ось 3 | -80°~145° |
| Ось 4 | -220°~220° |
| Ось 5 | -130°~130° |
| Ось 6 | -360°~360° |
| Максимальная скорость движения по Осям: | |
| Ось 1 | 210°/секунду |
| Ось 2 | 210°/секунду |
| Ось 3 | 265°/секунду |
| Ось 4 | 420°/секунду |
| Ось 5 | 420°/секунду |
| Ось 6 | 885°/секунду |
| Допустимый крутящий момент: | |
| Ось 4 | 35 Н·м |
| Ось 5 | 35 Н·м |
| Ось 6 | 11 Н·м |
| Допустимый момент инерции: | |
| Ось 4 | 1.1 кг·м² |
| Ось 5 | 1.1 кг·м² |
| Ось 6 | 0.42 кг·м² |
| Точность повторного позиционирования | ±0.08 мм |
| Максимальный охват | 2118 мм |
| Вес робота | 258.5 кг |
| Способ крепления | к поверхности пола |
| Требования к условиям Использования: | |
| Средняя температура | 0-45°C |
| Относительная влажность | 20-80% (без конденсата) |
| Вибрации | < 0.5 G |
| Другие | Робот должен быть установлен вдалеке от горючих или коррозионных жидкостей и газов, источников электрических помех |
| Уровень IP | Корпус IP54,Манипулятор IP67 |
| Преимущества | Компактные размеры, высокая скорость, высокая точность, легкое управление |
| Применение | Перемещение, погрузка и разгрузка, штамповка, сборка |




























{kind=link}
{kind=link}